
 码垛机器人的离线编程与仿真.docx
码垛机器人的离线编程与仿真.docx
《码垛机器人的离线编程与仿真.docx》由会员分享,可在线阅读,更多相关《码垛机器人的离线编程与仿真.docx(6页珍藏版)》请在第一文库网上搜索。
1、任务12:码垛机器人的离线编程与仿真实训任务单实训时间实训地点实训任务1 .创建码垛机器人工作站。2 .创建码垛机器人工艺流程仿真。实训目的1 .掌握码垛机器人工作站创建方法。2 .掌握创建Smart组件进行码垛工作站动作仿真。3 .掌握码垛机器人的程序编程。4 .掌握码垛工作站仿真的调试方法和技巧。实 训设备工具使用工具:电脑、RobotStudio软件、打包文件。使用文件:总结任务单。实训步骤1.下达任务;2.教师演示;3.学生实操。实训班级实训分组组别组长组员:实训评价评价项目评价标准学生姓名得分自评互评教评总分学1、出勤10分2、遵守课堂纪律程度5分3、回答问题5分4、独立作业25分5
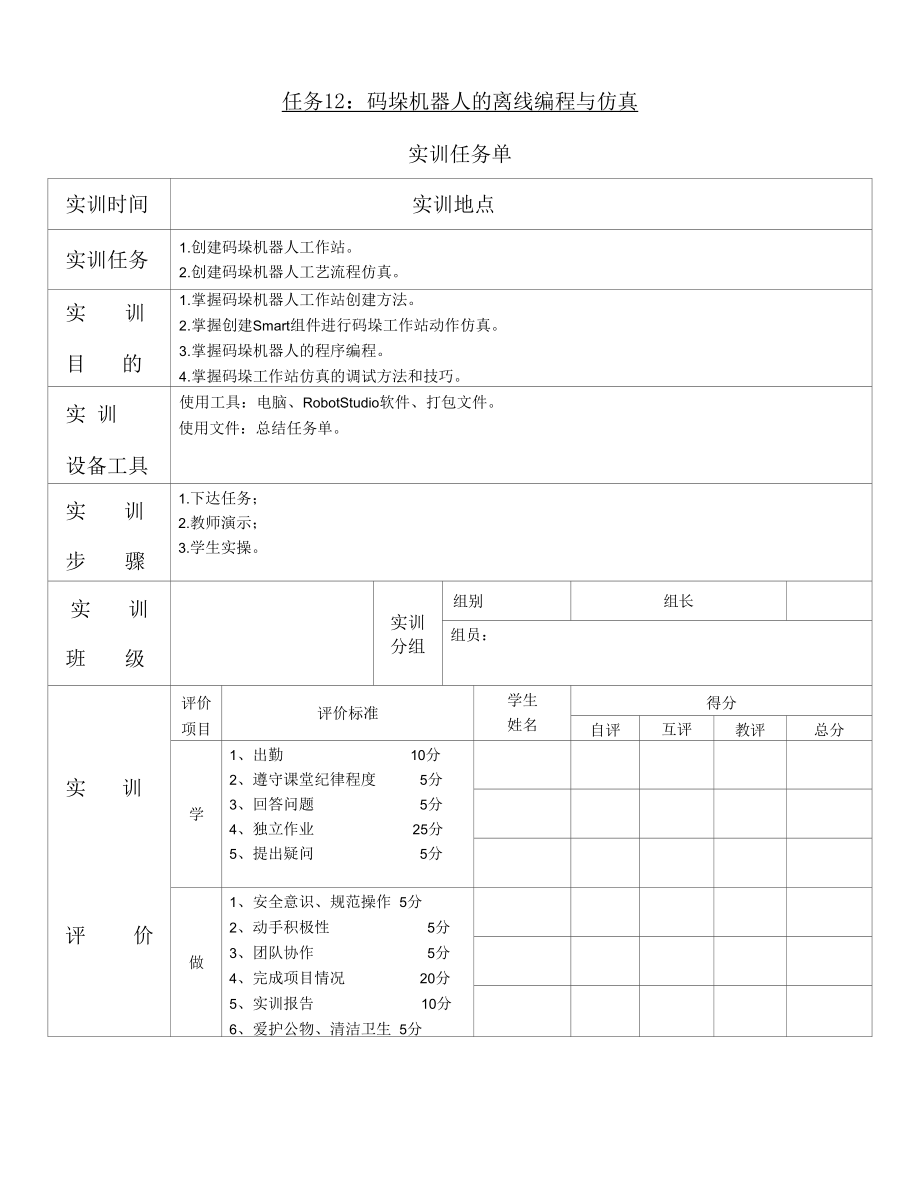
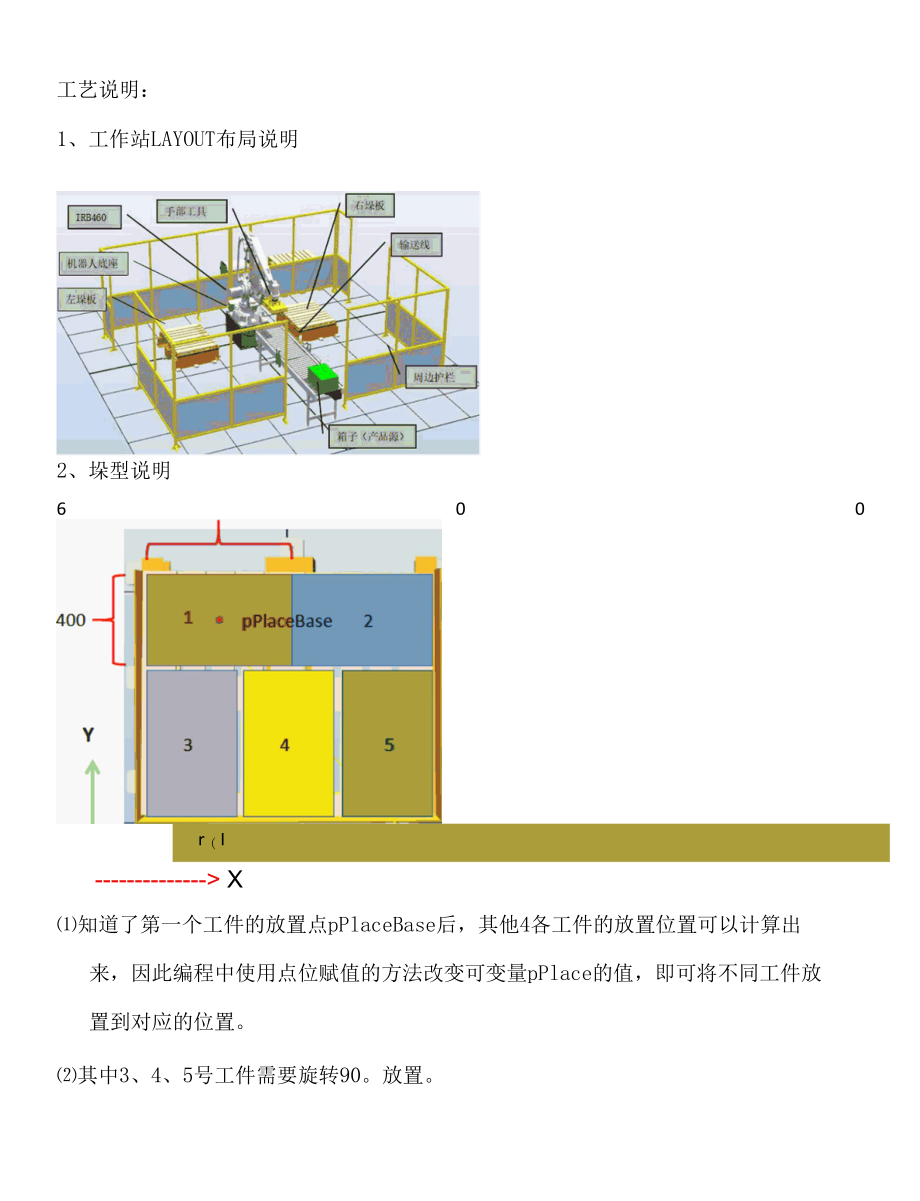
2、、提出疑问5分做1、安全意识、规范操作 5分2、动手积极性5分3、团队协作5分4、完成项目情况20分5、实训报告10分6、爱护公物、清洁卫生 5分工艺说明:1、工作站LAYOUT布局说明2、垛型说明600r ( I X知道了第一个工件的放置点pPlaceBase后,其他4各工件的放置位置可以计算出来,因此编程中使用点位赋值的方法改变可变量pPlace的值,即可将不同工件放置到对应的位置。其中3、4、5号工件需要旋转90。放置。3、工艺流程分析作业准备系统启动输送线输送产品,到位后发信号(3)拾取产品到安全高度(4)放置产品到垛盘回原点,循环工作4、Smart组件设计分析搬运物体的效果感应产品吸



- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 码垛 机器人 离线 编程 仿真
 第一文库网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
第一文库网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 调和油系列产品项目可行性研究报告.doc
调和油系列产品项目可行性研究报告.doc
-
三相调压器项目可行性研究报告.doc
-
可行性分析报告设立XX基金管理公司项目可行性分析报告.doc
-
丁硅料项目可行性研究报告.doc
-
二手车交易市场建设项目可行性研究报告.doc
-
二手车交易市场项目可行性研究报告.doc
-
二万头商品猪项目可行性研究报告大纲2.doc
-
二氢松油醇项目可行性研究报告.doc
-
二氧化钛项目可行性研究报告.doc
-
二位五通电磁换向阀项目可行性研究报告.doc
-
二聚酸项目可行性研究报告.doc
-
从化项目可行性报告XXXX329.doc
-
二氧化碳回收项目可行性研究报告.doc
-
水性油墨工程技术研发中心项目可行性研究报告.doc
-
水杀菌消毒项目可行性研究报告.doc
-
水稻种植及加工产业化项目可行性报告.docx
-
水暖五金配件项目可行性研究报告.doc
-
汽车行业-汽车教学整车模型项目可行性研究报告.doc
-
汽车行业-汽车电机零部件项目可行性研究报告.doc
-
汽车行业-汽车空调压缩机支架项目可行性研究报告.doc
-
汽车行业-汽车轮钢项目可行性研究报告摩森咨询·专业编写可行性.doc
-
水果筛选项目可行性研究报告.doc
-
水质改良剂项目可行性研究报告.doc
-
汽车行业-汽车空调电器总成项目可行性研究报告.doc
-
汽车行业-汽车钢卷项目可行性研究报告.doc
-
水泥厂项目可行性研究报告.docx
-
江苏省某幼儿园学校配套停车场项目建议书(代可行性研究报告).docx
-
水泥预制件墙板项目可行性研究报告.doc
-
江西省金韵生态农业示范园建设项目可行性研究报告页(1).docx
-
汽车行业-汽车美容护理用品项目可行性研究报告.doc
-
汽车行业-汽车轮胎套筒项目可行性研究报告.doc
-
汽车行业-汽车阀门项目可行性研究报告.doc
-
县志办依法治县工作总结三篇.docx
-
县招商引资工作汇报材料.docx
-
县政府领导班子开展作风建设专项行动工作情况报告.docx
-
县教体局关于开展春季开学专项督导检查工作的通知.docx
-
县政府办干部“三抓三促”行动学习心得体会五篇精选.docx
-
县教育系统2023年党建工作实施方案.docx
-
县教育系统领导干部任用考核管理暂行办法(试行).docx
-
县教育局学前教育宣传月活动实施方案推荐范文.docx
-
县教育局2023年工作要点.docx
-
县民政局在2023年第一季度安全生产工作调度会议上的发言.docx
-
县新的社会阶层人士联谊会成立大会上的讲话.docx
-
县突发水污染事件的应急预案精编完整版范文三篇.docx
-
县科技局2021年工作总结及2022年工作计划材料.docx
-
县级联系服务基层工作汇报.docx
-
县数管局2022年上半年全面深化改革工作进展情况汇报.docx
-
县政法书记《信访工作条例》实施一周年学习心得体会十二篇.docx
-
县社会保险事业管理中心2023年第一季度工作总结(20230425).docx
-
县数据资源管理局2022年上半年工作总结和下半年工作计划.docx
-
县政法书记《信访工作条例》实施一周年学习心得体会七篇.docx

